视觉引导定位

应用概述
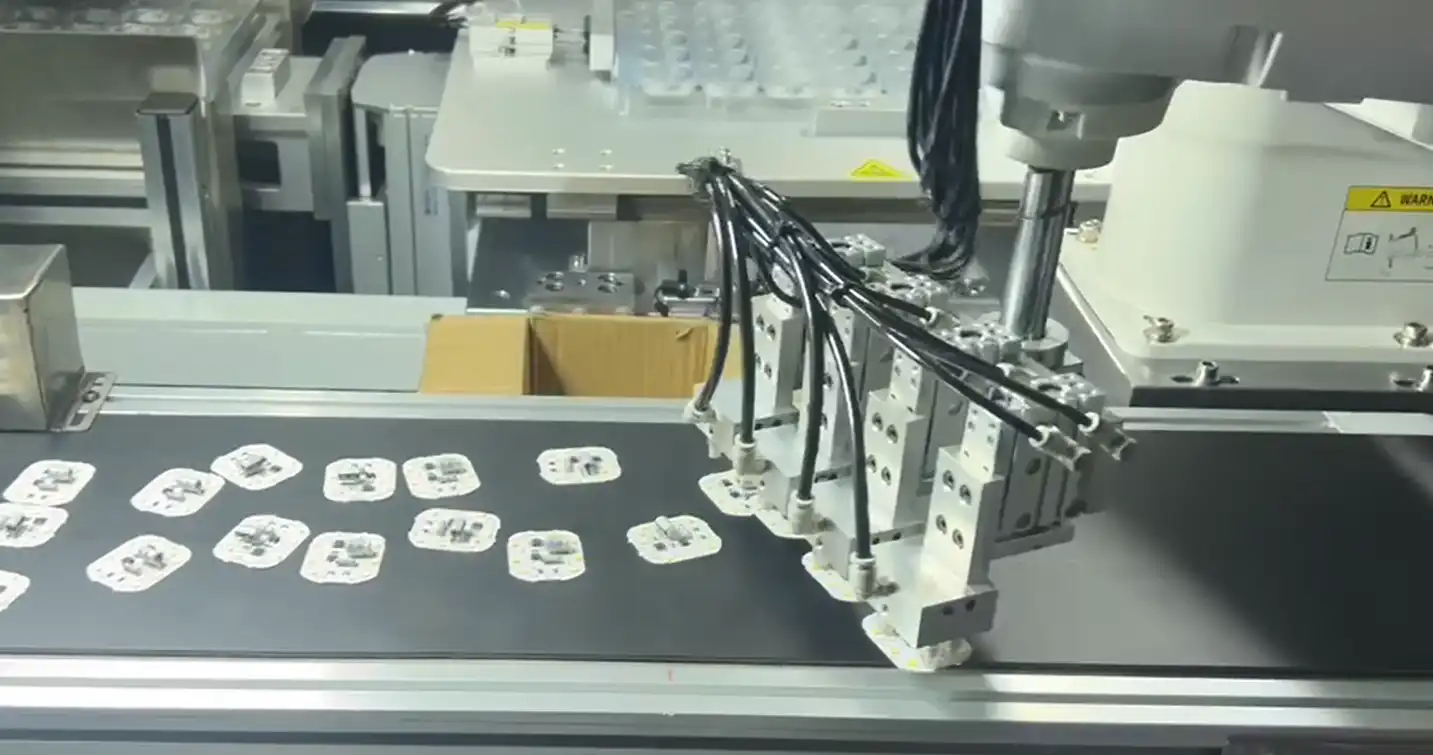
视觉引导定位是通过高分辨率工业相机实时采集工作区域图像,运用先进的图像处理和模式识别算法,精确计算目标物体的位置、姿态和尺寸信息,并将这些信息发送给机器人控制器,引导机器人完成装配、抓取、焊接、喷涂等自动化操作。该系统支持多种机器人品牌和型号,可广泛应用于汽车制造、电子装配、机械加工等自动化生产线。
技术特点
- 高精度定位:采用亚像素级图像处理算法,定位精度可达±0.02mm,满足精密装配需求
- 快速响应:图像处理和坐标计算时间小于100ms,确保实时引导
- 多目标识别:支持同时识别和定位多个目标物体,提高生产效率
- 姿态计算:精确计算物体的六自由度姿态信息,支持复杂装配操作
- 自适应环境:适应不同光照条件和背景环境,保持稳定性能
- 多品牌兼容:支持ABB、KUKA、FANUC、YASKAWA等主流机器人品牌
应用场景
视觉引导定位系统适用于各类需要精确定位的自动化制造场景:
- 汽车制造:车身零部件装配、发动机组件安装、玻璃贴合、密封条粘贴
- 电子装配:PCB板元件贴装、芯片封装、连接器插接、显示屏组装
- 机械加工:工件上下料、CNC机床定位、刀具更换、零件分拣
- 包装码垛:产品抓取、包装箱定位、码垛规划、托盘搬运
- 食品加工:食品分拣、包装定位、标签识别、质量检测
- 医药制造:药品包装、医疗器械装配、灌装定位、贴标引导
系统优势
汉特士视觉引导定位系统凭借丰富的项目经验,为客户提供可靠的自动化解决方案:
- 易于部署:模块化设计,支持快速安装和调试,缩短项目周期
- 稳定可靠:工业级硬件和算法设计,确保24/7小时稳定运行
- 灵活配置:支持多种相机布局和标定方式,适应不同应用场景
- 智能标定:一键自动标定功能,简化系统维护流程
- 完善支持:提供从方案设计到售后支持的全生命周期服务